️Co-authors

Prof Dianne Cook
Department of Econometrics and Business Statistics, Melbourne, Monash University

Dr. Emi Tanaka
Research School of Finance, Actuarial Studies and Statistics, Australian National University
Asst Prof Susan VanderPlas
Statistics Department, University of Nebraska-Lincoln

A/Prof Klaus Ackermann
Department of Econometrics and Business Statistics, Melbourne, Monash University, Australia
Challenges in interpreting residual plots reliably
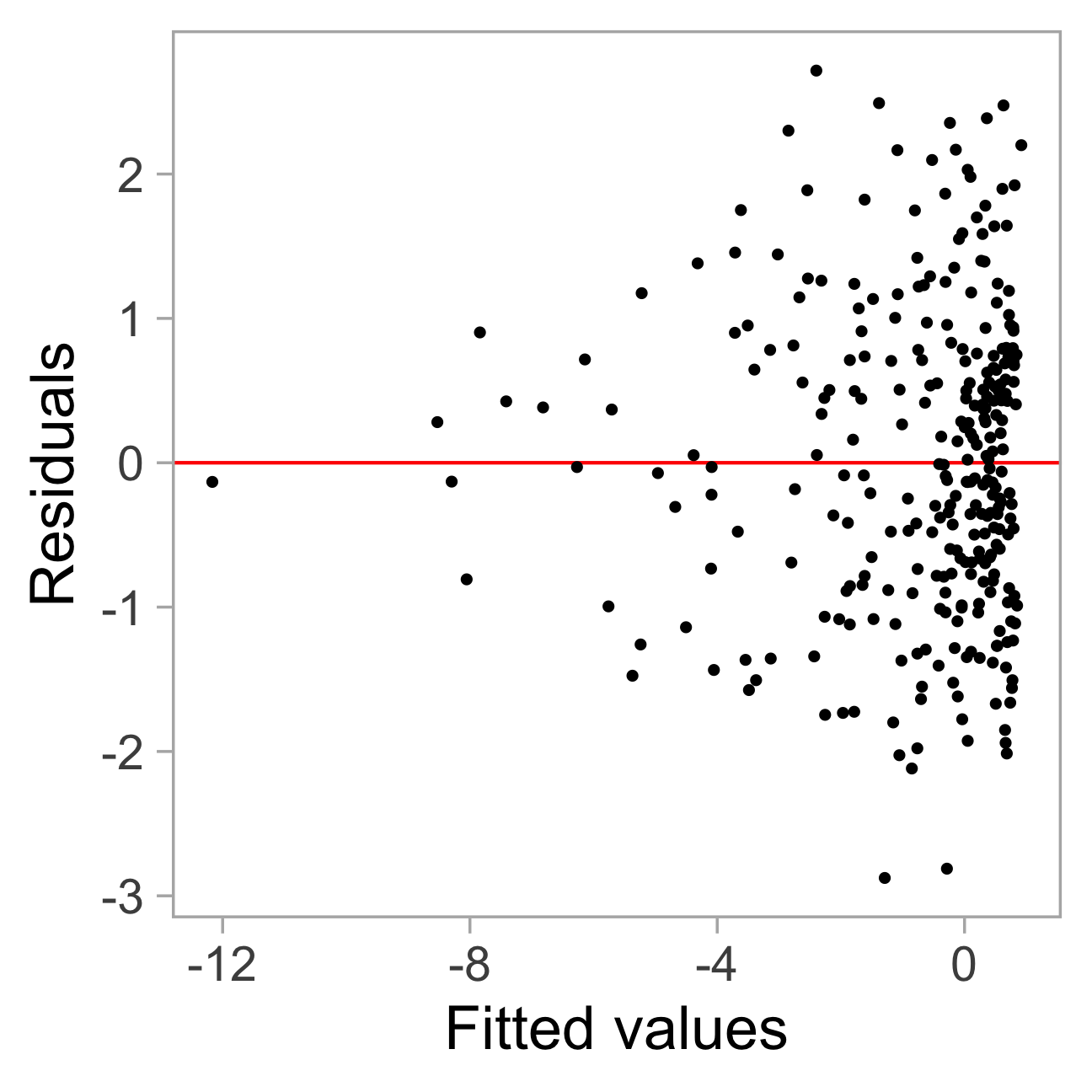
Residual plot of a simple linear regression:
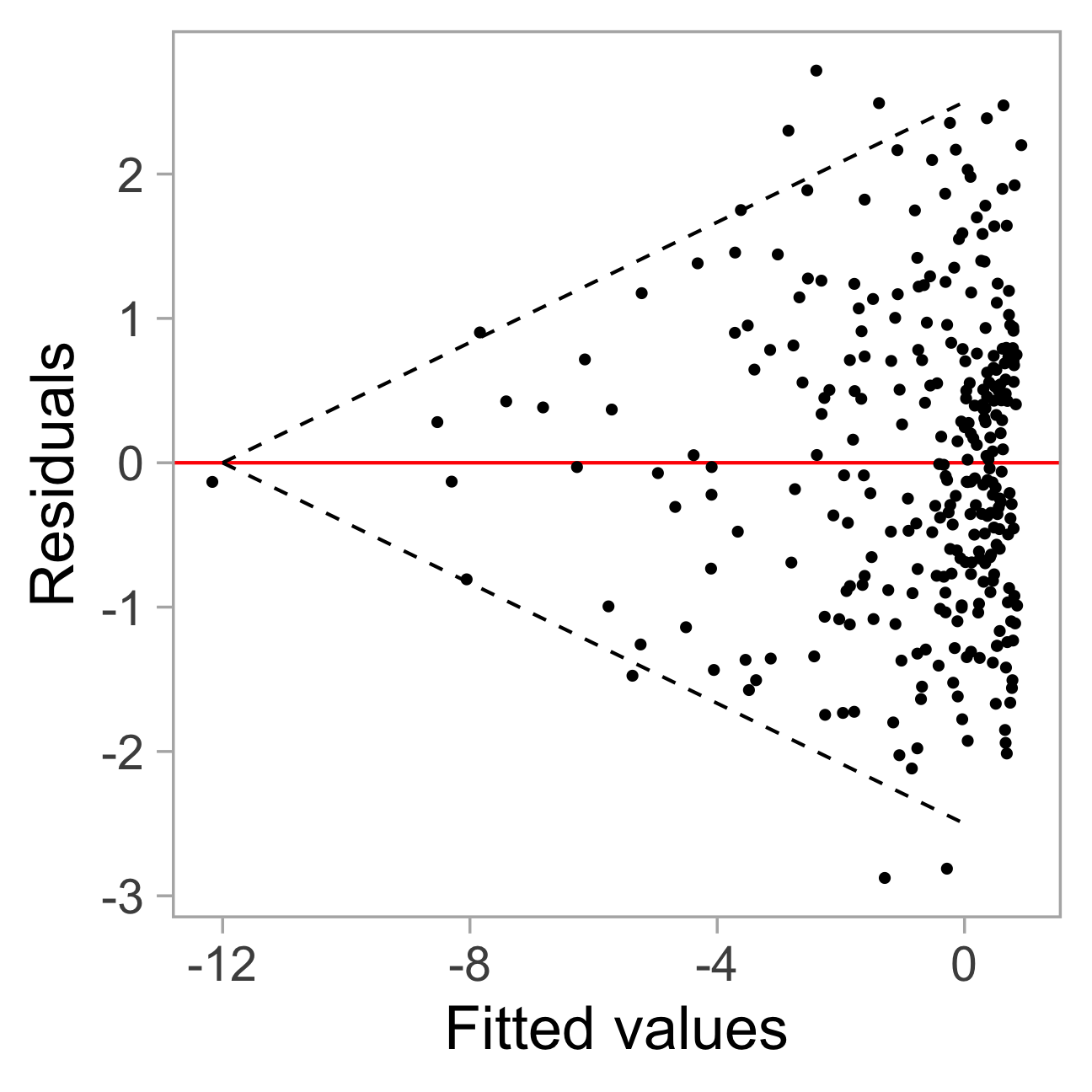
Heteroskedasticity: Vertical spread of the points varies with the fitted values.
However, this is an over-interpretation.
The visual pattern is caused by a skewed distribution of the predictor.
Visual inference (Buja, et al. 2009)
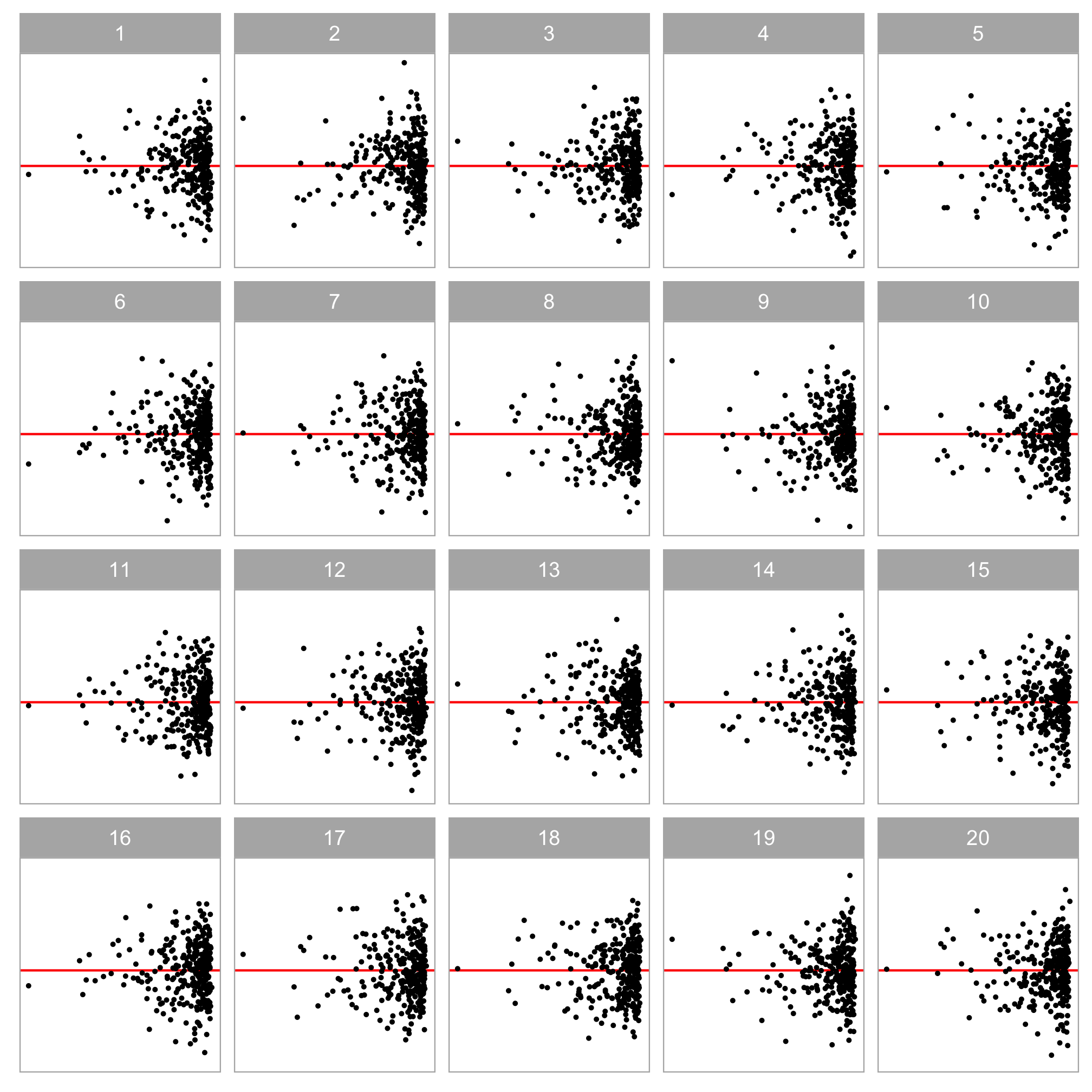
A lineup of residual plots:
- 1 actual residual plot
- 19 null plots containing residuals simulated from the fitted model.
To perform a visual test:
- Ask observer(s) to pick the most different plot(s).
- Calculate the p-value using the beta-binomial model (VanderPlas et al., 2021).
Computer vision model
Modern computer vision models are well-suited for addressing this challenge.
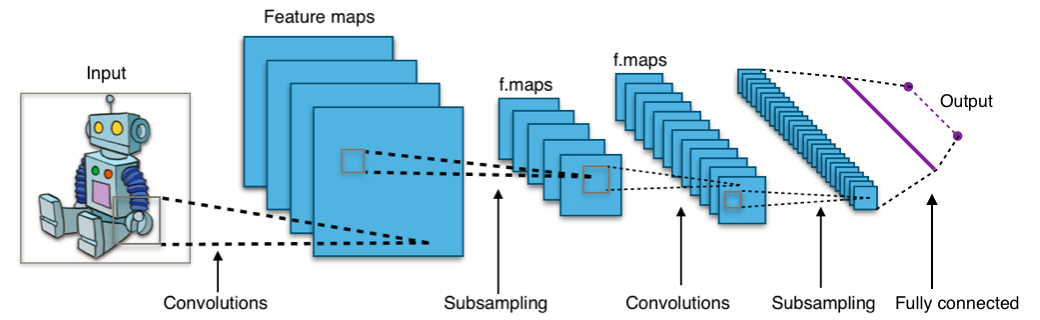
Source: https://en.wikipedia.org/wiki/Convolutional_neural_network
Simulation of training data
Non-linearity + Heteroskedasticity

Non-normality + Heteroskedasticity
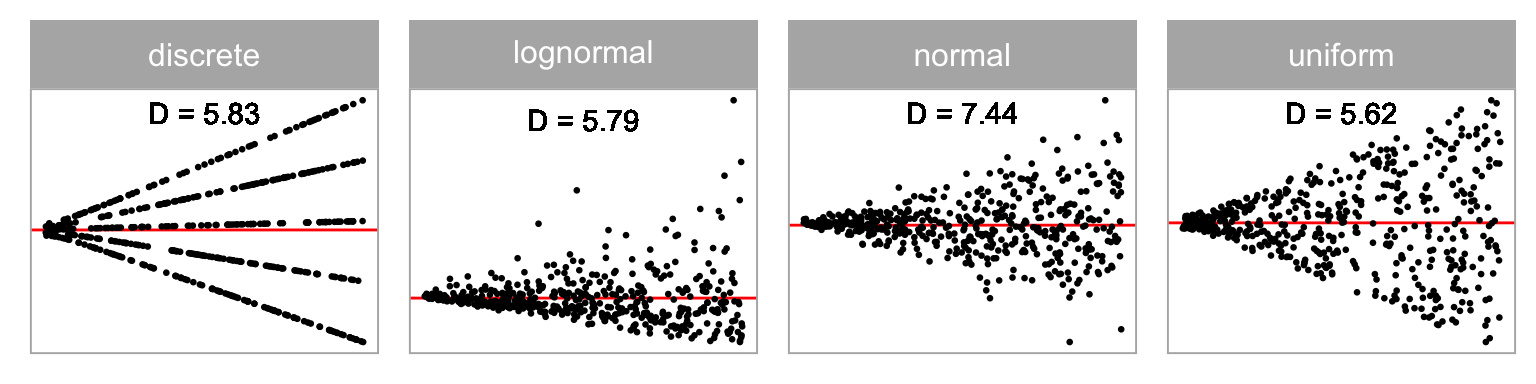
Distribution of predictor

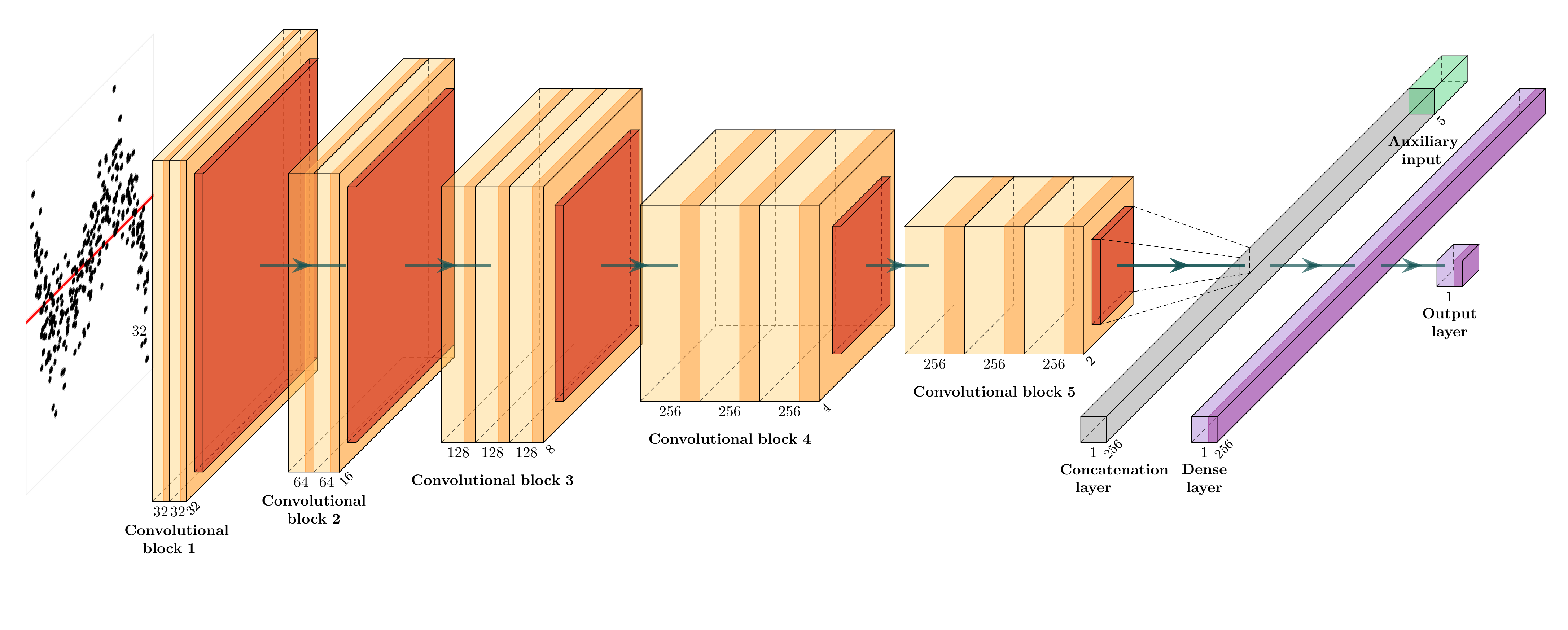
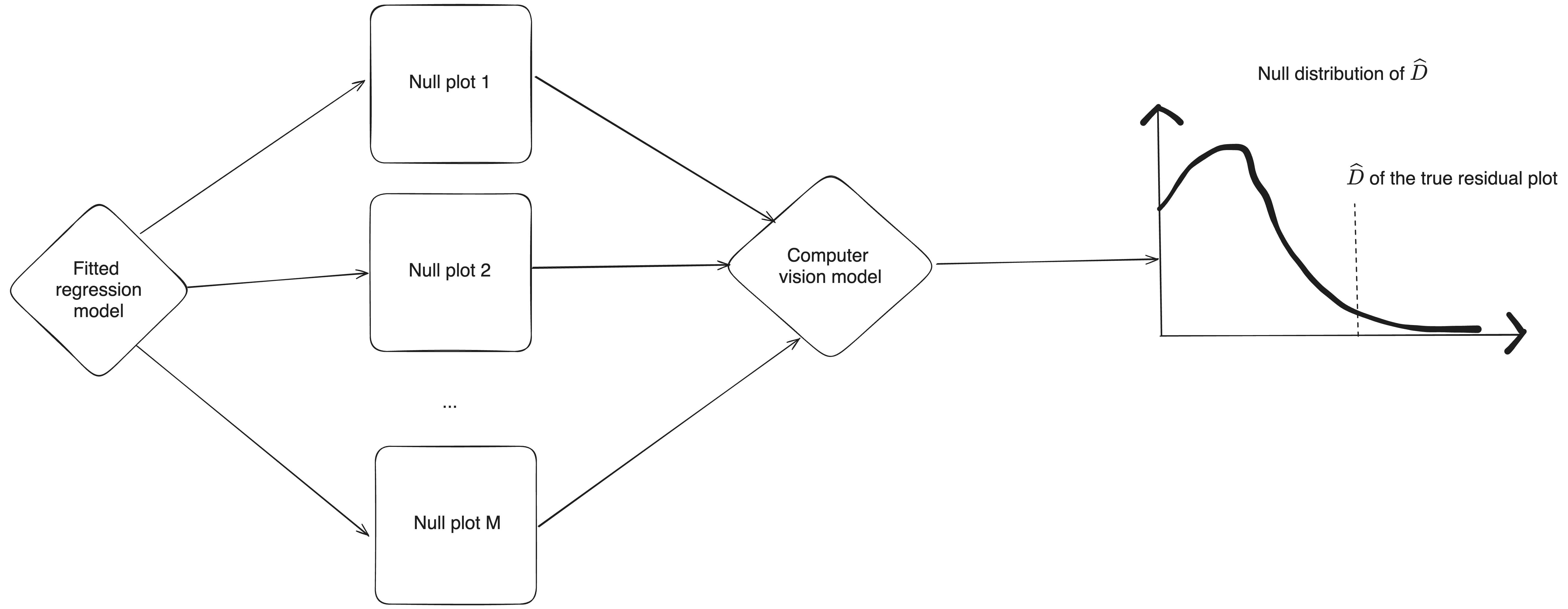
Estimation of D
We train a computer vision model to estimate D with 64,000 simulated residual plots:
\widehat{D} = f_{CV}(V_{h \times w}(\boldsymbol{e}, \boldsymbol{\hat{y}})),
where V_{h \times w}(.) generates an h \times w image, and f_{CV}(.) predicts a non-negative distance.
Statistical testing
Example: Boston housing
library(autovi)
fitted_model <- lm(MEDV ~ RM + LSTAT + PTRATIO, data = housing)
checker <- residual_checker(fitted_model)
checker$plot_resid()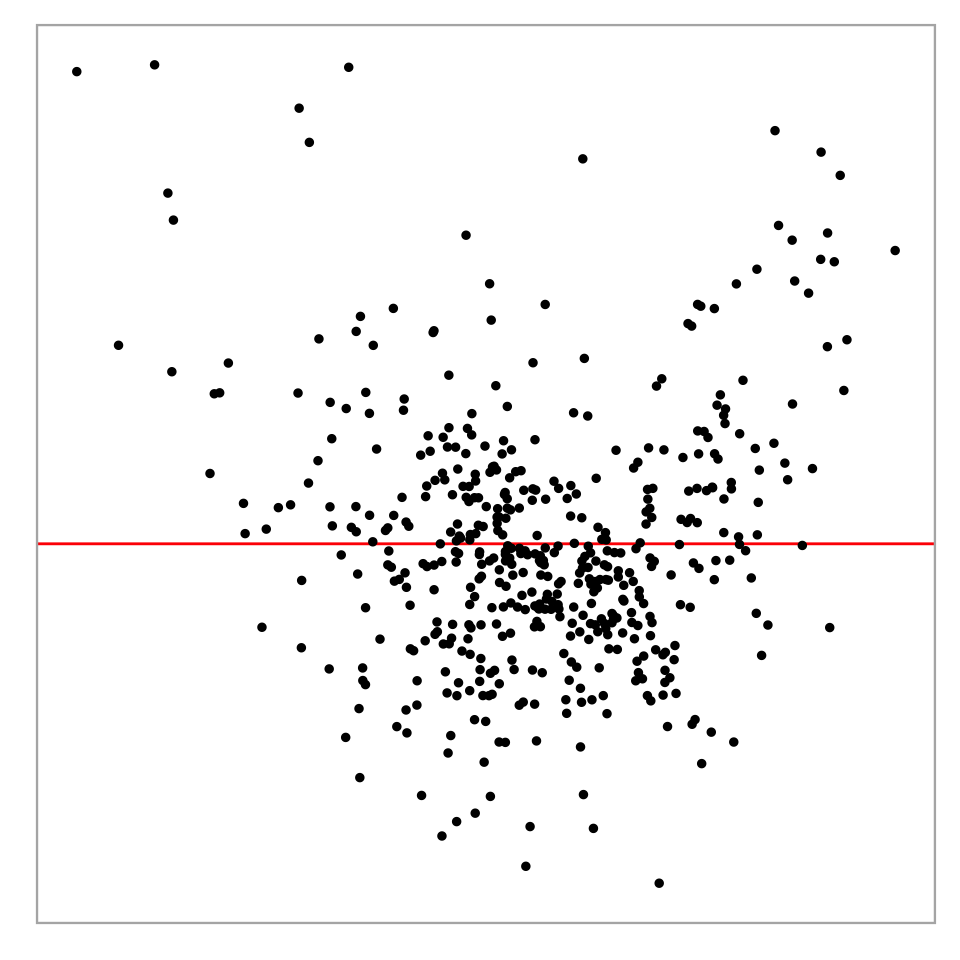
rotate_resid()
Null residuals are simulated from the fitted model assuming it is correctly specified.
# A tibble: 489 × 2
.fitted .resid
<dbl> <dbl>
1 632372. 82404.
2 525177. 24363.
3 646753. -16642.
4 624848. 7895.
5 611817. -25387.
6 551051. -128980.
7 504757. -37748.
8 445700. 33616.
9 281912. -17081.
10 453398. -103580.
# ℹ 479 more rows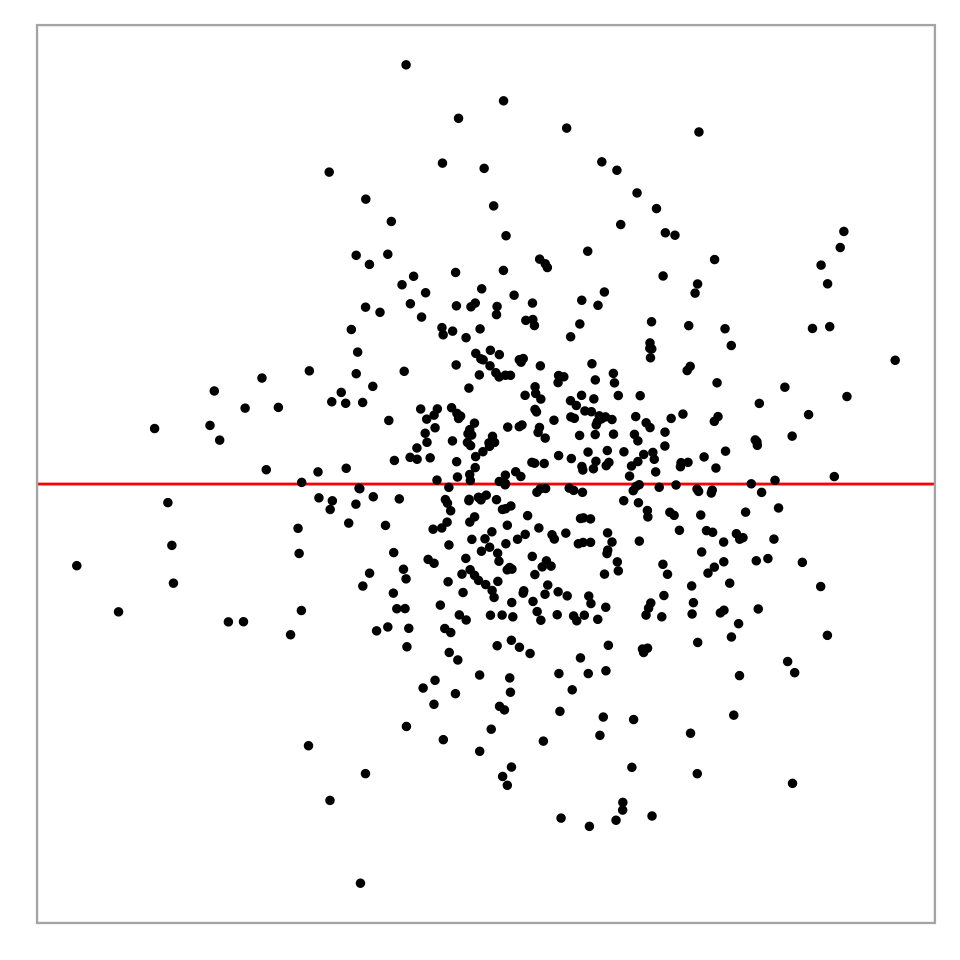
check() and summary_plot()
── <AUTO_VI object>
Status:
- Fitted model: lm
- Keras model: (None, 32, 32, 3) + (None, 5) -> (None, 1)
- Output node index: 1
- Result:
- Observed visual signal strength: 6.484 (p-value = 0)
- Null visual signal strength: [100 draws]
- Mean: 1.169
- Quantiles:
╔══════════════════════════════════════════╗
║ 25% 50% 75% 80% 90% 95% 99% ║
║1.037 1.120 1.231 1.247 1.421 1.528 1.993 ║
╚══════════════════════════════════════════╝
- Bootstrapped visual signal strength: [100 draws]
- Mean: 6.28 (p-value = 0)
- Quantiles:
╔══════════════════════════════════════════╗
║ 25% 50% 75% 80% 90% 95% 99% ║
║5.960 6.267 6.614 6.693 6.891 7.112 7.217 ║
╚══════════════════════════════════════════╝
- Likelihood ratio: 0.7064 (boot) / 0 (null) = Extremely large 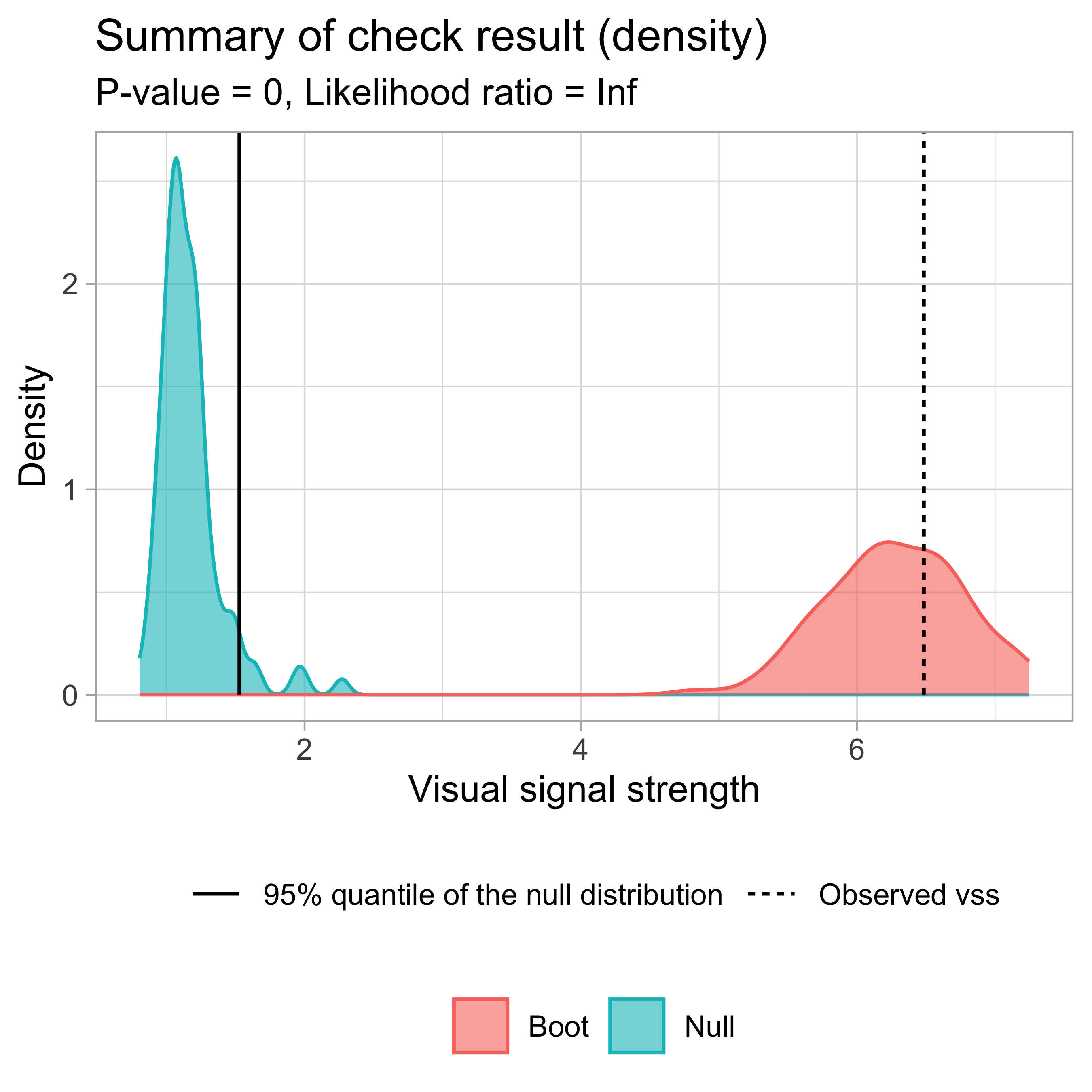
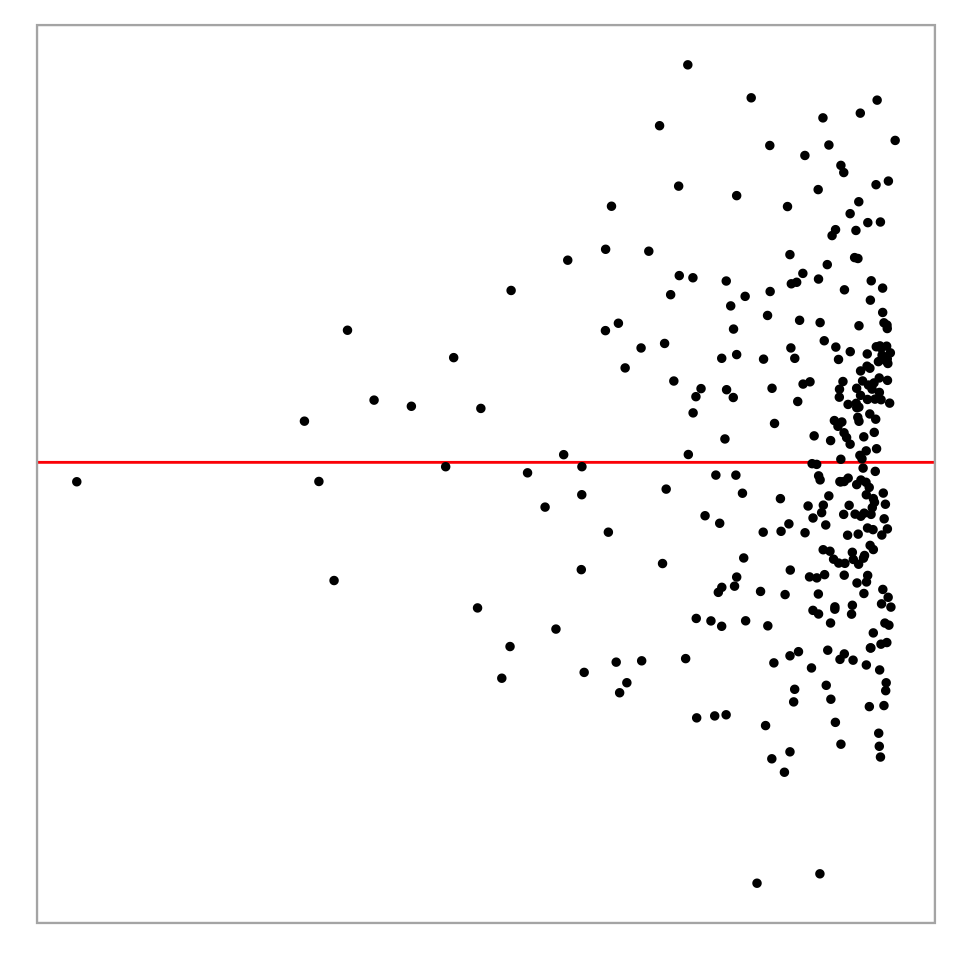
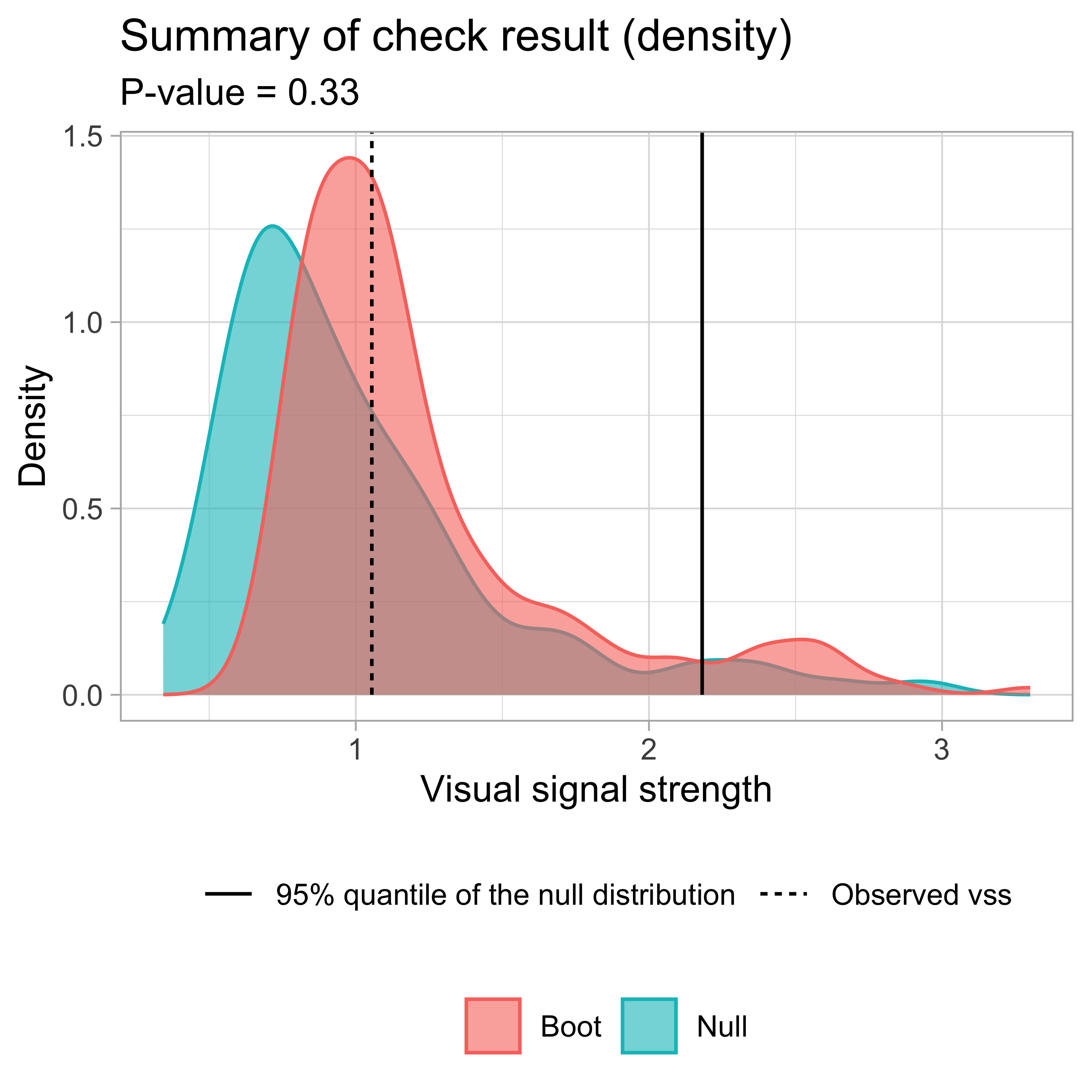
Example: Left-triangle
Breusch–Pagan test p-value = 0.0457
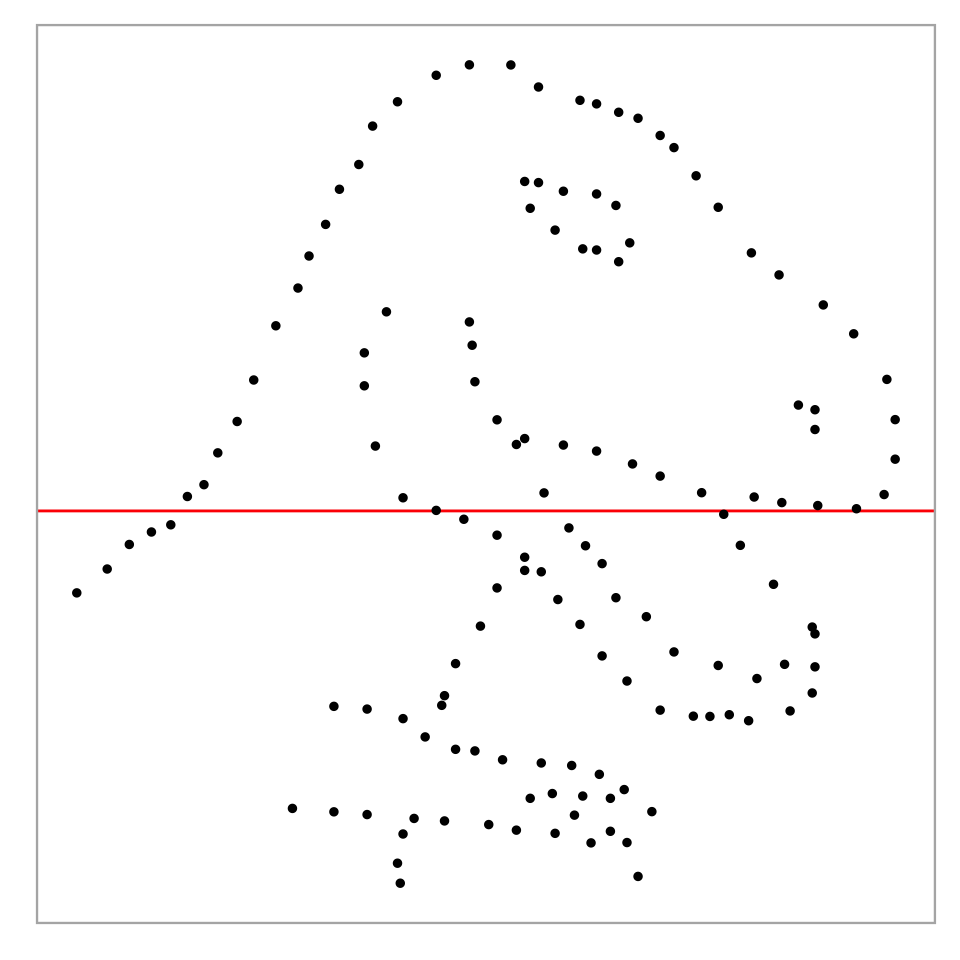
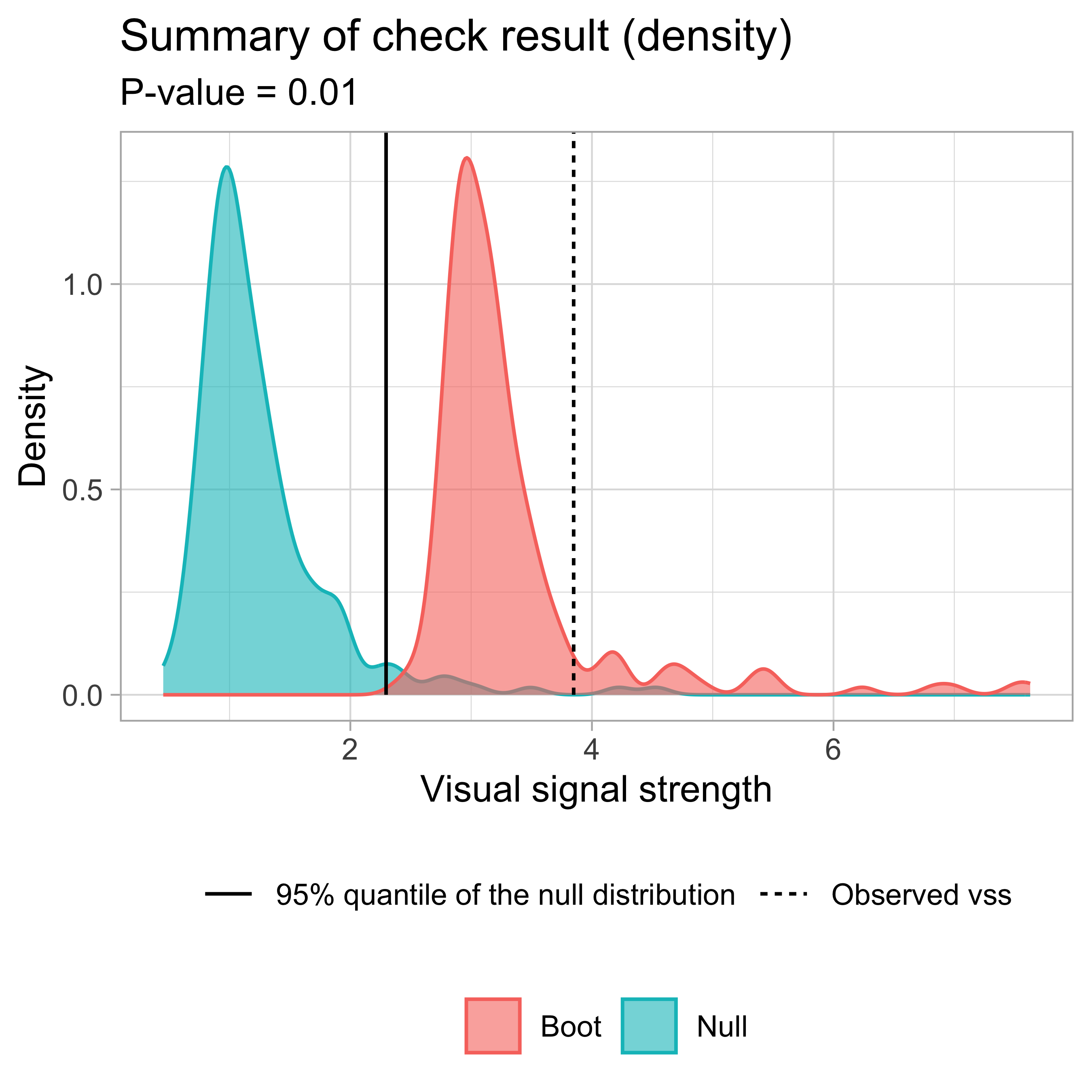
💡Example: Dinosaur
Ramsey Regression Equation Specification Error test p-value = 0.742
Breusch–Pagan test p-value = 0.36
Shapiro-Wilk test p-value = 9.21e-05
Thanks! Any questions?
tengmcing